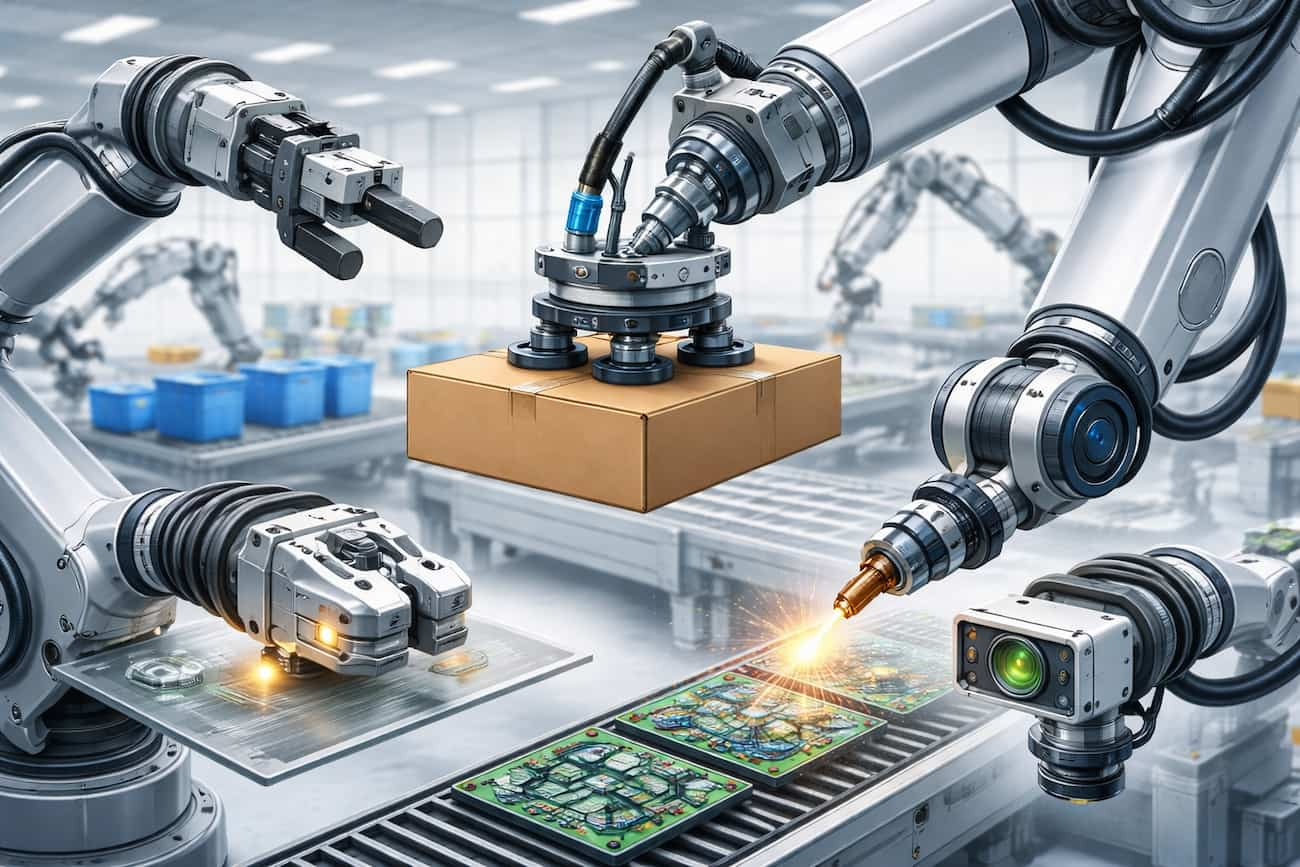
En los sistemas de automatización industrial y robótica, uno de los elementos más importantes para que un robot pueda interactuar con el entorno es el End-of-Arm-Tooling (EOAT), también conocido como OAT (End-of-Arm Tool) o efector final.
Este componente es el elemento que se instala en el extremo del brazo robótico y que permite realizar tareas como agarrar, manipular, ensamblar, soldar o inspeccionar piezas.
Sin el EOAT adecuado, incluso el robot más avanzado sería incapaz de ejecutar operaciones productivas.
En este artículo explicamos qué es el EOAT, qué tipos existen, cómo funciona y por qué es fundamental en las líneas de producción automatizadas.
Qué es el EOAT (End-of-Arm-Tooling)
El EOAT (End-of-Arm-Tooling) es el conjunto de herramientas que se monta en el extremo de un robot industrial para permitirle interactuar con piezas, productos o materiales durante el proceso productivo.
En otras palabras, es el elemento que convierte el movimiento del robot en una acción útil.
Dependiendo de la aplicación, el EOAT puede permitir al robot:
- Sujetar piezas
- Transportar productos
- Soldar componentes
- Aplicar adhesivos
- Pulir superficies
- Inspeccionar calidad
- Atornillar o ensamblar piezas
Cada EOAT se diseña específicamente para una tarea concreta, teniendo en cuenta factores como el peso, la forma o el material de la pieza manipulada.
Para qué sirve el EOAT en robótica industrial
El EOAT es esencial porque actúa como la interfaz entre el robot y el proceso productivo.
Entre sus principales funciones destacan:
Manipulación de piezas
Permite agarrar, mover o posicionar productos dentro de una línea automatizada.
Operaciones de proceso
Puede incorporar herramientas que ejecutan tareas industriales como:
- soldadura
- pintura
- mecanizado
- pulido
- aplicación de adhesivos
Control e inspección
Algunos EOAT integran cámaras o sensores que permiten realizar inspección de calidad o control dimensional durante el proceso.
Componentes principales de un EOAT
Un sistema EOAT suele estar formado por varios elementos que trabajan conjuntamente.
1. Sistema de fijación al robot
Es la interfaz que conecta la herramienta con el brazo robótico.
Normalmente utiliza bridas estándar (ISO) para garantizar compatibilidad con diferentes robots.
2. Actuadores
Son los elementos que generan el movimiento de la herramienta.
Pueden ser:
- Neumáticos (muy utilizados por su rapidez y coste reducido)
- Eléctricos (mayor precisión y control)
- Hidráulicos (para aplicaciones de gran fuerza)
3. Sensores
Permiten controlar el proceso y asegurar la manipulación correcta de las piezas.
Los más habituales son:
- sensores de proximidad
- sensores de fuerza o par
- sensores de presencia
- sistemas de visión artificial
4. Estructura o bastidor
Es la estructura mecánica que soporta los componentes del EOAT y garantiza su rigidez y resistencia durante el ciclo de trabajo.
Tipos de EOAT más utilizados en automatización
Existen diferentes tipos de EOAT dependiendo de la aplicación industrial.
Pinzas o grippers
Son los EOAT más comunes.
Permiten sujetar piezas mediante dedos mecánicos o sistemas de agarre controlados.
Pueden ser:
- pinzas neumáticas
- pinzas eléctricas
- pinzas paralelas
- pinzas angulares
Sistemas de vacío
Utilizan ventosas para manipular piezas mediante succión.
Son muy comunes en:
- paletizado
- manipulación de cajas
- industria del vidrio
- manipulación de chapas metálicas
EOAT magnéticos
Utilizan campos magnéticos para manipular materiales ferromagnéticos como chapas de acero.
EOAT de proceso
En lugar de sujetar piezas, ejecutan directamente una operación industrial.
Ejemplos:
- pistolas de soldadura
- pistolas de pintura
- herramientas de desbarbado
- sistemas de pulido
EOAT de inspección
Integran cámaras industriales o sensores para:
- control de calidad
- medición dimensional
- detección de defectos
Aplicaciones del EOAT en la industria
Los EOAT se utilizan en prácticamente todos los sectores que emplean robótica industrial.
Automoción
- soldadura robotizada
- manipulación de piezas metálicas
- ensamblaje de componentes
Industria alimentaria
- manipulación de productos
- paletizado
- empaquetado
Logística y almacenes automatizados
- clasificación de paquetes
- picking robotizado
Electrónica
- ensamblaje de componentes
- manipulación de piezas delicadas
Industria del plástico
En el moldeo por inyección, el EOAT se utiliza para extraer piezas del molde, separarlas y depositarlas en cintas transportadoras.
Ventajas del uso de EOAT en automatización industrial
La implementación de EOAT en robots industriales ofrece numerosas ventajas.
Mayor productividad
Permite automatizar tareas repetitivas y aumentar la velocidad de producción.
Mayor precisión
Los robots equipados con EOAT pueden realizar operaciones con alta repetibilidad y precisión.
Mayor seguridad
La automatización reduce la exposición de los operarios a tareas peligrosas o repetitivas.
Flexibilidad en producción
Mediante sistemas de cambio rápido de herramienta, un robot puede utilizar diferentes EOAT para realizar múltiples tareas dentro de la misma línea.
Cómo elegir el EOAT adecuado
Seleccionar el EOAT correcto es un factor crítico para el rendimiento de una célula robotizada.
Algunos de los aspectos que deben analizarse son:
- peso de la pieza
- geometría del producto
- material
- velocidad del ciclo
- precisión requerida
- entorno de trabajo
Un EOAT mal diseñado puede provocar:
- fallos en la manipulación
- desgaste prematuro
- reducción de productividad
Por este motivo, el diseño del EOAT suele realizarse de forma personalizada para cada proceso industrial.
Diseño e integración de EOAT en proyectos de automatización
El diseño de EOAT forma parte del desarrollo de una célula robotizada completa.
En proyectos de automatización industrial se suele realizar:
- Análisis del proceso productivo
- Estudio de manipulación de piezas
- Diseño mecánico del EOAT
- Integración con el robot
- Programación y pruebas
Una correcta ingeniería del EOAT permite optimizar:
- tiempos de ciclo
- fiabilidad del proceso
- calidad del producto final
Automatización industrial con Zeleron
En Zeleron desarrollamos soluciones completas de automatización industrial y robótica, diseñando células robotizadas adaptadas a cada proceso productivo.
Nuestro equipo de ingeniería trabaja en:
- diseño de EOAT personalizados
- integración de robots industriales
- automatización de líneas de producción
- proyectos llave en mano
Cada proyecto se desarrolla con un enfoque técnico orientado a maximizar la eficiencia, flexibilidad y productividad de las líneas industriales.